


중국 스타트업 림엑스 다이내믹스 개발…질주하는 중국 로보틱스 기술
트럭의 급회전, 급정지, 급가속 상황 속에서도 안정적으로 걸음 이어가
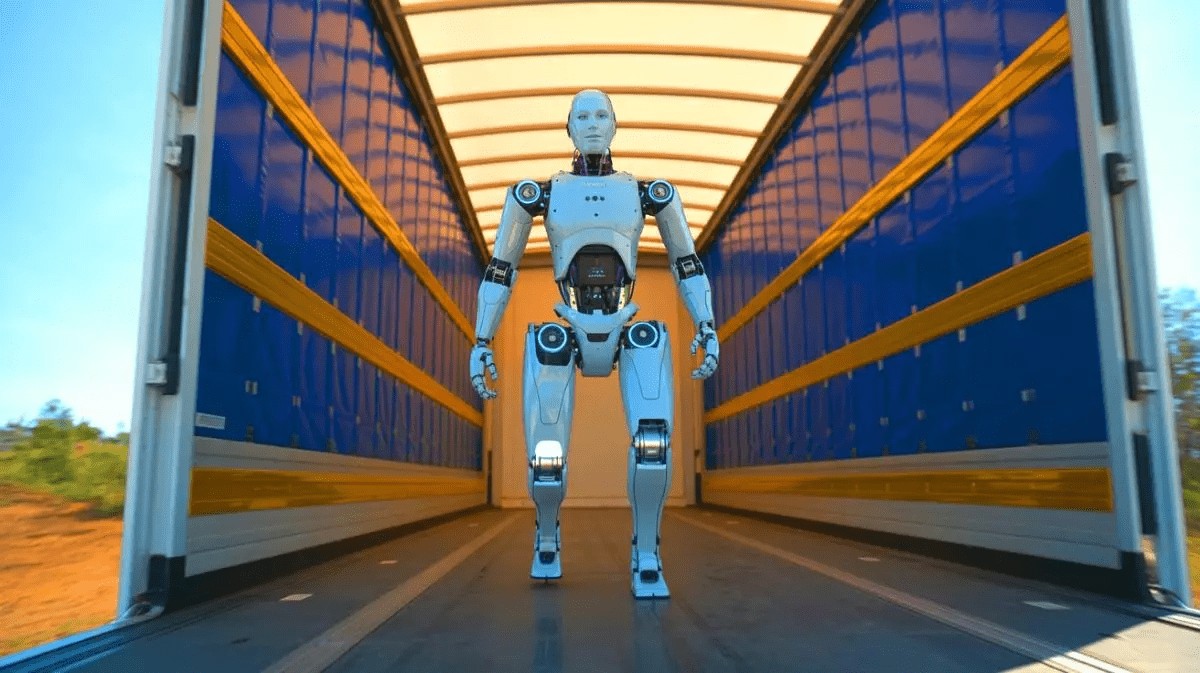
[아이티데일리] 중국 로보틱스 회사 림엑스 다이내믹스(LimX Dynamics)가 개발한 최첨단 이족보행 휴머노이드 로봇 ‘트론1(Tron 1)’이 관련 업계로부터 주목받고 있다고 원더풀엔지니어링이 전했다.
최근 진행된 시연에서 트론1은 균형감과 민첩성 면에서 놀라운 성능을 보였다. 트론1은 전속력으로 달리는 트럭의 적재함에 탑승, 외부의 지지 없이도 트럭의 급회전, 급정지, 급가속 상황 속에서 안정적으로 걸음을 이어갔다. 중국의 휴머노이드 로봇 기술은 하루가 다르게 급발전하고 있다.
지난해 처음 공개된 트론1은 로봇 공학 엔지니어 및 연구자들을 위한 연구개발(R&D) 플랫폼으로 설계됐다. 목적은 휴머노이드 로봇의 이동성 한계를 실험하고 난제를 극복하기 위함이었다.
트론1에는 다양한 지형과 사용 환경에 적응할 수 있도록 발 구조를 바꿀 수 있고, 실시간으로 소프트웨어 설정을 조정하는 적응형 모션 제어 시스템이 탑재됐다. 이러한 설계로 인해 트론1은 구조화된 환경은 물론 비구조적인 환경에서도 뛰어난 이동성 연구가 가능하다고 한다.
달리는 트럭에서 진행된 이번 시연은 트론1의 핵심 차별점을 강조하고 있다. 실시간 센서 융합과 제어 알고리즘을 통해 불안정한 조건에서도 직립 자세를 유지할 수 있다는 것이다. IEEE 스펙트럼에 따르면, 이러한 동적 균형 능력은 복잡하고 예측 불가능한 실제 산업 현장에서 로봇이 자율적으로 움직일 수 있도록 하는 데 중요한 의미를 갖는다.
물리적 성능 외에도 트론1은 유연한 소프트웨어 및 하드웨어 구조를 기반으로 제작됐다. 개발자들은 오픈 SDK(소프트웨어 개발 키트)와 하드웨어 인터페이스를 통해 모델 기반 또는 학습 기반 제어 시스템을 자유롭게 실험할 수 있다. 특히, 림엑스 다이내믹스가 자체 개발한 관절 액추에이터는 이족보행에 최적화되어 정밀한 동작과 안정성을 구현한다.
트론1은 또한 파이썬(Python)과 완벽히 통합되어 있어, 저수준 프로그래밍으로 인한 개발 장벽을 낮췄다. '원클릭 시뮬레이션-현실 전환(Sim2Real)' 기능을 통해 시뮬레이션에서 실제 로봇 테스트 환경으로 손쉽게 전환할 수 있다. 이는 강화 학습 알고리즘을 연구하는 이들에게 매우 유용하다. 개발자는 기존 논리를 다시 작성할 필요 없이 시뮬레이션 코드와 실제 프로토타입 간을 손쉽게 이동할 수 있다.
트론1 생태계는 엔비디아 아이작(Isaac), 무조코(Mujoco), 가제보(Gazebo) 등 인기 시뮬레이터들과 호환되며, 충실한 문서화, 코드 샘플, URDF(통합 로봇 기술 설명 포맷) 사용으로 시뮬레이션과 실제 구현 간의 간극을 줄여 반복 개발 시간을 대폭 단축시킨다.
확장 가능한 구조로 설계된 트론1은 라이다(LiDAR), 로봇 팔, 듀얼 스펙트럼 짐벌, 카메라 등을 장착할 수 있어 학술 연구, 산업 실험, 자율 내비게이션, AI 알고리즘 검증 등 다양한 분야에 활용될 수 있다. 특히 빠른 움직임 속에서도 균형을 유지하는 능력은 창고, 제조 현장, 심지어 사람과 상호작용이 많은 가정 환경에서도 공동 작업용 로봇으로서 큰 잠재력을 보여준다.
트론1과 같은 휴머노이드 로봇이 집안일을 하고, 노인을 돌보며, 복잡한 재난 현장을 탐색하는 차세대가 눈 앞에 다가오고 있다는 진단이다.